English/Japanese
Haptic interface I
人工的な力を人間に提示するデバイスにハプティックインタフェースと呼ばれるものがあります.ロボットの遠隔操作において力を提示するために開発されたマスタアームがその原型とも言えます.我々はこれまで小型のハプティックインタフェースを開発してきました.5リンク空間機構と改良型デルタ機構と呼ぶパラレル機構をシリアルに組み合わせることで,小型ながら比較的大きな作業領域を実現する6自由度のハプティックインタフェースです.

Fig. 1 A Compact 6-DOF Haptic Interface
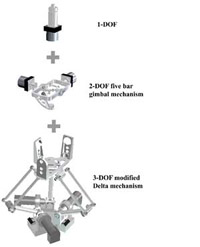
Fig. 2 Distribution of degrees of freedom.
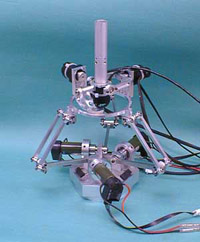
Fig. 3 The first prototype model
参考文献
- 妻木勇一,成瀬仁,D. N. Nenchev, 内山勝,5リンクパラレルジンバル
機構を用いた6自由度小型高性能ハプティックインターフェースの開発,第
15回日本ロボット学会学術講演会予稿集,pp. 651-652, 1997.
- 妻木勇一,成瀬仁,内山勝,6自由度小型高性能ハプティックインター
フェース,日本機械学会[No. 98-4]ロボティクス・メカトロニクス講演会'
98講演論文集,No.2BI3-7, 1998.
- Y. Tsumaki, H. Naruse, D. N. Nenchev and M. Uchiyama, Design of
a Compact 6-DOF Haptic Interface, Proceedings 1998 IEEE
International Conference on Robotics and Automation, Leaven,
Belgium, pp. 2580-2585, 1998.
- 妻木勇一,成瀬仁,内山勝,6自由度小型ハプティックインターフェー
スシステム,日本バーチャルリアリティ学会第3回大会論文集,pp.7-8,
1998.
- 伊能寛,佐藤大祐,妻木勇一,内山勝,小型6自由度ハプティックイン
タフェースの評価実験,第45回自動制御連合講演会講演論文集,
pp. 213-214, 2002.
- 妻木勇一,成瀬仁,木南匡敬,伊能寛,阿部幸勇,内山勝,小型6自由
度ハプティックインタフェースの開発,日本ロボット学会誌, Vol. 23,
No. 4, pp. 474-481, 2005.
 Research Top
Research Top