
Haptic interface I
We proposed a new compact 6-DOF haptic interface with large workspace in 1997. It contains a newly developed five bar spatial gimbal mechanism for orientation, placed on a modified Delta parallel-link mechanism. The motion range of each axis of the five bar mechanism is over ±70 degrees. Quick motions can be realized easily due to the parallelism inherent to both the modified Delta substructure and the five bar substructure.
Fig. 1 A Compact 6-DOF Haptic Interface
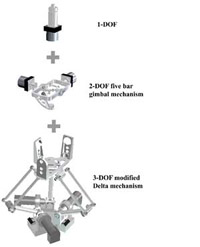
Fig. 2 Distribution of degrees of freedom.
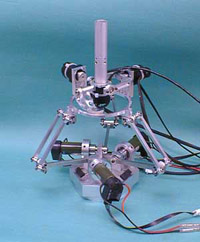
Fig. 3 The first prototype model
References