Teleoperation
人間の持つスキルをロボットを通して再現することにより,複雑な作業 を遠隔地で実現することが目的です.このため双碗のテレオペレーションシ ステムの研究を行っています.宇宙ロボットを念頭においた開発を行ってい ますが,その技術は遠隔手術や極限環境下での作業など,地上における様々 なシチュエーションにも応用することを考えています.現在は,誰もが簡単 に使えるユーザーインタフェースや高い臨場感をオペレータに提示できるカ メラアームの開発などを行っています.
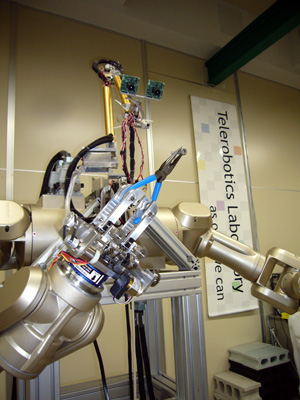
Fig. 1 Dual arm teleoperation system

Fig. 2 Camera arm
参考文献