Teleoperation
We are aiming to achieve dexterous manipulation based on both redundancy and singularity by a singularity consistent approach which can handle singularity problem. In addition, a novel hand which can use various planar tools is introduced. A 6-DOF camera arm is also developed for efficient and inituitive teleoperation system.
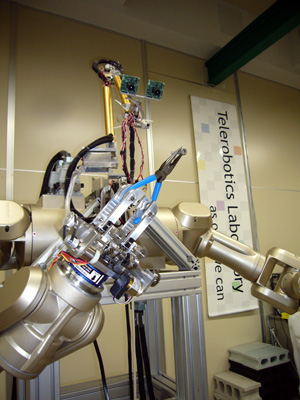
Fig. 1 Dual arm teleoperation system

Fig. 2 Camera arm
References