Paralle Gripper with Capability to Use Various Tools
Many kinds of multi-fingered hand with many actuators and complex mechanisms have been developed to achieve diversity like human hand. The main focus of our research is achieving such diversity with simple mechanisms. A developed robot hand can use various planar tools which human uses in daily life. For example, scissors, nipper and pliers …etc. We introduce a new mechanism with a passive table at each fingertip and show demonstrations to confirm its feasibility to handle various tools.
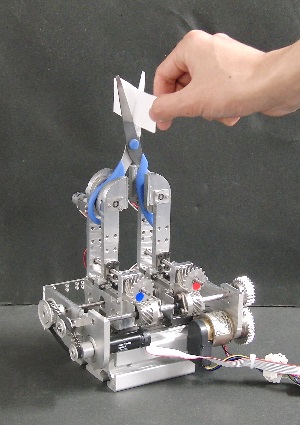
Fig. 1 A Novel Prallel Gripper
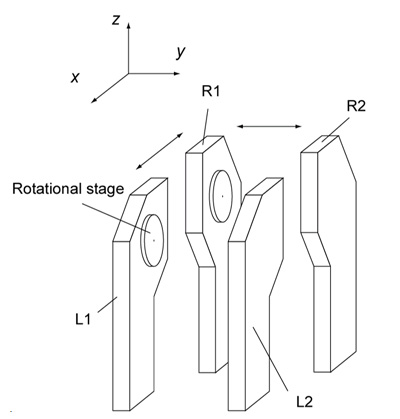
Fig. 2 The gripper with passive rotational stages
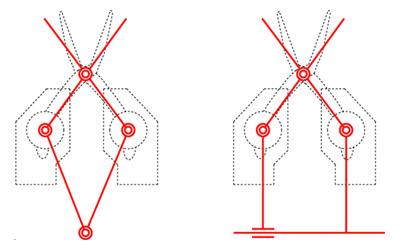
Fig. 3 Principle of our gripper
References