English/Japanese
Wearable robot
これまで,私達はロボットを通して遠隔地に居る人と人とがコミュニケー
ションを図るシステムとして「テレコミュニケーター」と呼ぶ新しいロボット
システムを提案してきました.ロボット技術を使うことで,見たいところを自
由に見たり,ジェスチャを交えるなど,従来の携帯電話では実現できない密度
の濃いコミュニケーションを実現することができます.遠隔地に本当に居るか
のような感覚を実現することが目標です.小型のテレイグジスタンスシステム
と考えることができます.
Video (3.6 Mbyte) in 2005
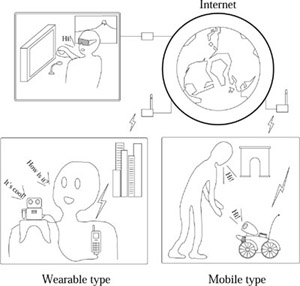
Fig. 1 Concept of telecommunicator

Fig. 2 Telecommunicator T1

Fig. 3 Overview of T1

Fig. 4 A photo of an operator
参考文献
- 妻木勇一,D. N. Nenchev, 内山勝,テレコミュニケーター,日本機械
学会 [No. 98-4]ロボティクス・メカトロニクス講演会'98講演論文集,
No.2CI3-6, 1998.
- 妻木勇一,藤田雄太郎,佐藤千秋,ウェアラブルテレコミュニケーター
の設計,第19回日本ロボット学会学術講演会予稿集,pp. 735-736,
2001.
- 藤田雄太郎,佐藤千秋,妻木勇一,ウェアラブルロボットT1の開発,日
本機械学会 [No. 02-6] ロボティクス・メカトロニクス講演会'02講演論文
集, 1A1-F06, 2002.
- 葛西昭治,妻木勇一,小型軽量ウェアラブルロボットT2の開発,日本機
械学会 [No. 02-6] ロボティクス・メカトロニクス講演会'02講演論文集,
1A1-F07, 2002.
- Y. Tsumaki, Y. Fujita, A. Kasai, C. Sato, D. N. Nenchev and
M. Uchiyama, Telecommunicator: A Novel Robot System for Human
Communications, Proceedings of the 11th IEEE International Workshop
on Robot and Human Interactive Communication, pp. 35-40, 2002.
- 妻木勇一,葛西昭治,藤田雄太郎,ウェアラブルロボットを用いたテレ
イグジスタンスシステム,日本バーチャルリアリティ学会第7回大会論文集,
pp. 403-404, 2002.
- 葛西昭治,妻木勇一,USBからの電源供給を利用したウェアラブルロボッ
トの制御,第20回日本ロボット学会学術講演会予稿集,1F21, 2002.
- 葛西昭治,藤田雄太郎,妻木勇一,ウェアラブルテレコミュニケーター
T2の動作実験,第45回自動制御連合講演会講演論文集,pp. 219-220,
2002.
- 田村哲也,妻木勇一,葛西昭治,テレコミュニケーターT3の開発,日本
バーチャルリアリティ学会第9回大会論文集,pp. 471-472, 2004.
- 田村哲也,河合聡志,妻木勇一,葛西昭治,ウェアラブル型双方向テレ
イグジスタンスシステムの開発,[No. 05-4] ロボティクス・メカトロニク
ス講演会'05講演論文集, 1P2-N-053, 2005.
- 妻木勇一,藤田雄太郎,田村哲也,菅原康人,葛西昭治,ウェアラブル
テレコミュニケーター,日本バーチャルリアリティ学会論文誌,Vol. 10,
No. 4, pp. 467-474, 2005.
- 葛西昭治,妻木勇一,ウェアラブルロボットのためのタイムシェアリン
グモータ制御,日本機械学会論文集(C編),Vol. 73, No. 736,
pp. 3234-3240, 2007.
 Research Top
Research Top