English/Japanese
Humanoid robot
これまで,たくさんのヒューマノイドロボットが開発されてきました.し
かし,そのほとんどのロボットが膝を曲げたまま歩いています.膝を伸ばした
状態は特異点と呼ばれ,従来の制御手法では制御できない点でした.また,そ
の近傍も過大な関節角速度が発生するため使うことができない領域でした.こ
れに対し,我々は特異点適合法(Singularity Consistent Approach, SC
Approach)と呼ぶ制御手法を提案しています.これは,特異点やその近傍にお
いても安全な制御を実現する方法です.一方,人間は,特異点を上手に利用し
ています.特異点では大きな力を出したり早く動いたりすることができるから
です.我々は特異点適合法から得られた知見を応用し,新しく床下支点球面振
子モデルを提案することで,膝関節を0.01rad以下まで伸ばした動歩行制御を
実現しました(ビデオ参照).非冗長自由度の脚部を用いて,膝関節をここま
で伸ばしながら歩ける動歩行制御を達成したのは,我々のグループが最初です.
今後は,より人間らしい,自然な運動をヒューマノイドロボット上に実現する
ことが目標です.
Dynamic Walk with SIPUP method: Video1 (1.2Mbyte) in 2007

Fig. 1 Observation by video image
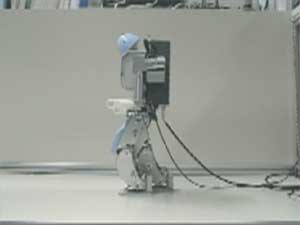
Fig. 2 Walking motion of Hoap-1 with SC approach
参考文献
- 関口暁宣,跡部有希,亀田幸季,妻木勇一,D. N. Nenchev, 特異点適
合法によるヒューマノイドロボットの動作生成に関する考察,第21回日本ロ
ボット学会学術講演会予稿集,2A-27, 2003.
- 亀田幸季,関口暁宣,妻木勇一,Dragomir N. Nenchev, 特異点近傍に
おける歩行動作生成,[No. 05-4] ロボティクス・メカトロニクス講演会'05
講演論文集, 1P2-S-042, 2005.
- 関口暁宣,鈴木健宏,跡部有希,妻木勇一,Dragomir N. NENCHEV, ヒュー
マノイドの足底形状に関する考察,[No. 05-4] ロボティクス・メカトロニ
クス講演会'05講演論文集, 1P2-S-043, 2005.
- 岩倉崇,高橋健太郎,西尾彰倫,逸見孝司,D. N. Nenchev, 関口暁宣,
妻木勇一,特異点適合法を用いたHoap-2の姿勢制御,[No. 05-4] ロボティ
クス・メカトロニクス講演会'05講演論文集, 2P1-S-051, 2005.
- Koki Kameta, Akinori Sekiguchi, Yuichi Tsumaki, Dragomir
N. Nenchev, Walking Control Using the SC Approach for Humanoid
Robot, Proceedings of the IEEE-RAS International Conference on
Humanoid Robots (Humanoids2005), pp. 289-294, 2005.
- 関口暁宣,跡部有希,亀田幸季,妻木勇一,Nenchev Dragomir, 特異点
近傍を通過するための歩行軌道生成手法,[No. 06-4] ロボティクス・メカ
トロニクス講演会'06 講演論文集, 2P1-B30, 2006.
- K. Takahashi, M. Noda, D. N. Nenchev, Y. Tsumaki, A. Sekiguchi,
Static Walk of a Humanoid Robot Based on the Singularity-Consistent
Method, Proceedings of the 2006 IEEE/RSJ International Conference on
Intelligent Robots and Systems, Paper ID:1070, 2006.
- 関口暁宣,亀田幸季,妻木勇一,Nenchev Dragomir, 線形倒立振子と支
点上下動を用いた歩行動作生成,第7 回計測自動制御学会システムインテグ
レーション部門講演会SI2006,1L1-5, 2006.
- 亀田幸季,関口暁宣,妻木勇一,Dragomir Nenchev, 床下支点倒立振子
を用いた歩行制御,ロボティクス・メカトロニクス講演会'07講演論文集,
1A1-B10, 2007.
- 亀田幸季,関口暁宣,妻木勇一,Dragomir N. Nenchev, 特異点適合法
によるヒューマノイドロボットの静歩行制御,日本機械学会論文集(C編),
Vol. 73, No. 727, pp. 790-795, 2007.
- 関口暁宣,跡部有希,亀田幸季,妻木勇一,Dragomir N. Nenchev, 特
異点近傍を通過するヒューマノイドの歩行軌道生成手法,日本機械学会論文
集(C編), Vol. 73, No. 727, pp. 796-802, 2007.
- Akinori Sekiguchi, Yuki Atobe, Koki Kameta, Yuichi Tsumaki and
Dragomir Nenchev, A Walking Pattern Generator around Singularity,
Proceedings of the IEEE-RAS International Conference on Humanoid
Robots (Humanoids2006), pp. 270-275, 2006.
- Akinori Sekiguchi, Koki Kameta, Yuichi Tsumaki, Dragomir
Nenchev, Biped Walk Based on Vertical Pivot Motion of Linear
Inverted Pendulum, Proceedings of the 2007 IEEE/ASME International
Conference on Advanced Intelligent Mechatronics, Zurich,
Switzerland, 165, 2007.
- Koki Kameta, Akinori Sekiguchi, Yuichi Tsumaki, Yoshikazu
Kanamiya (D.N. Nenchev), Walking Control around Singurlity Using a
Spherical Inverted Pendulum with an Underfloor Pivot, The IEEE-RAS
International Conference on Humanoid Robots (Humanoids2007),
Pittsburgh, Pennsylvania, 2007.
- 亀田幸季,関口暁宣,妻木勇一,金宮好和(D.N. ネンチェフ), 床下支
点球面振子を用いた歩行軌道生成法,日本機械学会論文集(C編),
pp. 380-385, Vol. 74, No. 738, 2008.
 Research Top
Research Top