English/Japanese
Delta-Type Parallel Mechanism with Wire-Pulleys
R. Clavelによって提案されたデルタ機構と呼ばれる3自由度の並進パラレル機構は,素早い動作が
可能なため産業用ロボットに応用されています.従来のデルタ機構は平行4リンク機構を3組組み合わせて
構成されています.我々は平行4リンク機構の代わりにワイヤプーリ機構を利用することで,より広い
作業領域を実現し,少ない部品点数で構成できることを示しました.ワイヤープーリは,他のパラレル機構
にも応用できます.

Fig. 1 Delta-Type Parallel Mechanism with Wire-Pulleys
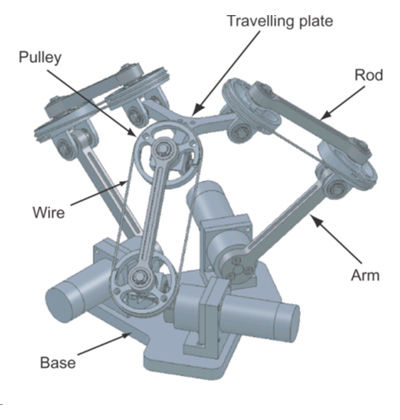
Fig. 2 Details of the mechanism
参考文献
-
江口広聡,妻木勇一,多田隈理一郎,
ワイヤ・プーリ型Delta 機構の作業領域,第18回ロボティクスシンポジア,pp. 114-119,
2013.
- Yuichi Tsumaki, Hiroaki Eguchi and Riichiro Tadakuma, A Novel
Delta-Type Parallel Mechanism with Wire-Pulleys, Proceedings of the
2012 IEEE/RSJ International Conference on Intelligent Robots and
Systems, IROS2012, pp. 1567-1572, Vila Moura, Algarve, Portugal, 2012.
-
江口広聡,妻木勇一,多田隈理一郎,ワイヤー・プーリ型デルタ機構,
第29回日本ロボット学会学術講演会講演集, RSJ2011AC1E3-4, 2011.
- 妻木勇一,山形大学妻木研究室のRT--平行保持パラレル機構設計技術・
開閉型工具把持ハンド技術--,第26回日本ロボット学会学術講演 会予稿集,
RSJ2008AC3M2-05, 2008.
 Research Top
Research Top