Hayabusa 2
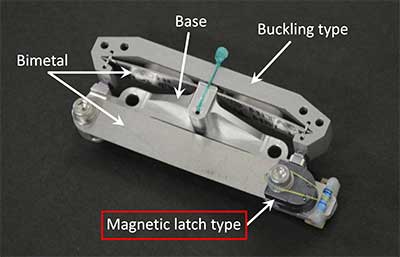
杮尋媶幒偱採埬偝傟偨乽娐嫬嬱摦乿偲偄偆僐儞僙僾僩偵婎偯偒奐敪偝傟偨娐嫬嬱摦宆堏摦婡峔乮EDT, Environement Driven Torquer, Fig. 1乯偑MinervaII-2乮儘乕僶俀乯偺堏摦婡峔偺堦偮偲偟偰嵦梡偝傟傑偟偨丏MinervaII-2偼彫榝惎偺傛偆側旝彫廳椡壓偱堏摦偡傞偨傔偺媄弍傪専徹偡傞偨傔偵丆戝妛僐儞僜乕僔傾儉乮搶杒戝妛丆嶳宍戝妛丆戝嶃戝妛丆搶嫗揹婡戝妛丆搶嫗棟壢戝妛乯偱奐敪偟偨彫榝惎扵嵏儘乕僶偱丆彫榝惎扵嵏婡偼傗傇偝2偵搵嵹偝傟傑偟偨丏偼傗傇偝俀偼丆2014擭12寧3擔偵懪偪忋偘傜傟丆2018擭6寧偵彫榝惎乽儕儏僂僌僂乿偵摓拝丏2020擭12寧6擔偵帋椏偑擖偭偨僇僾僙儖傪抧媴偵撏偗丆尰嵼傕師偺彫榝惎偵岦偐偭偰旘峴拞偱偡丏 MinervaII-2偼丆4庬椶偺堏摦憰抲傪搵嵹偟偰偍傝丆娐嫬嬱摦宆堏摦婡峔偼偦偺偆偪偺堦偮偱偡丏娐嫬嬱摦宆堏摦婡峔偼丆彫榝惎偺拫偲栭偺戝偒側壏搙嵎傪棙梡偟偰婡峔傪摦偐偟丆儘乕僶傪儂僢僾乮僕儍儞僾乯偝偣傞傾僀僨傿傾偑儀乕僗偵側偭偰偄傑偡乮Fig. 2乯丏偙偺傛偆偵丆乽娐嫬嬱摦乿偲偼丆揹婥傪夘偝偢偵娐嫬僄僱儖僊乕傪捈愙塣摦偵曄姺偡傞偙偲摿挜偱偡丏彫榝惎乽儕儏僂僌僂乿偺帺揮廃婜偼7.6帪娫側偺偱挬丆梉偺2夞丆偍偍傛偦4帪娫偍偒偵摦偔僠儍儞僗偑偁傝傑偡丏
偙偺傾僀僨傿傾傪幚尰偝偣傞偨傔偵丆擬朿挘棪偑堎側傞俀庬椶偺嬥懏傪挘傝崌傢偣偨僶僀儊僞儖傪巊偆偙偲偵偟傑偟偨丏僶僢僥儕乕傕CPU傕昁梫偁傝傑偣傫丏 娐嫬嬱摦宆堏摦婡峔偼丆杮尋媶幒偱奐敪偟偨帴愇儔僢僠宆偲曱揷尋媶幒偱奐敪偟偨嵗孅宆偑90搙偢傜偟偰慻傒崌傢偝傟偰偄傑偡丏30g埲撪偲偄偆惂尷偺拞偱丆儂僢僾偡傞壜擻惈傪峀偘傞偨傔偱偡丏MinervaII-2偼2019擭10寧3擔偵偼傗傇偝2偐傜暘棧偝傟丆彫榝惎乽儕儏僂僌僂乿偺廃夞婳摴傪夞偭偨屻丆彫榝惎忋偵拝棨偟傑偟偨丏巆擮側偑傜MINERVAII-2偺晄嬶崌偱儘乕僶偺忬嫷偼妋擣偱偒傑偣傫偱偟偨偑丆尰嵼傕儕儏僂僌僂忋偵偁傝丆拫偲栭傪7.6帪娫枅偵寎偊偰偄傑偡丏
奐敪偟偨娐嫬嬱摦宆堏摦婡峔傪妋幚偵摦嶌偝偣傞偨傔偵丆尋媶幒撪偵旝彫廳椡僔儈儏儗乕僞乮Fig. 3乯傪撈帺偵奐敪偟偰幚尡傪孞傝曉偟偨傝丆僽儗乕儊儞戝妛乮僪僀僣乯偺ZARM Drop Tower乮Fig. 4乯偵弌岦偄偰幚尡傪峴偄傑偟偨丏
Fig. 1 娐嫬嬱摦宆堏摦婡峔偺僼儔僀僩儌僨儖
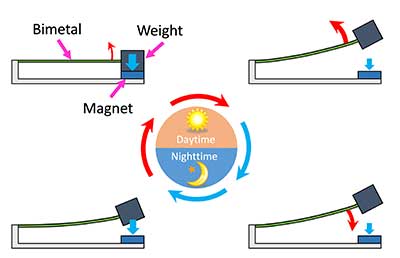
Fig. 2 娐嫬嬱摦宆堏摦婡峔偺尨棟
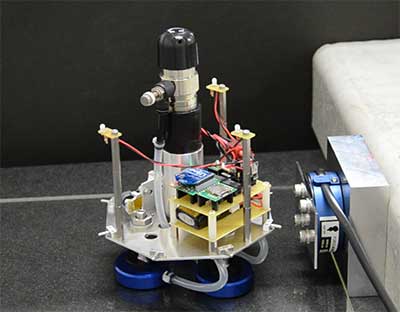
Fig. 3 儔儃撪偱偺旝彫廳椡幚尡

Fig. 4 ZARM偱偺棊壓帋尡
偼傗傇偝俀偐傜暘棧偝傟偨MinervaII-2
彫榝惎扵嵏婡乽偼傗傇偝俀乿@haya2_jaxa Twitter
嶲峫暥專