Space robot
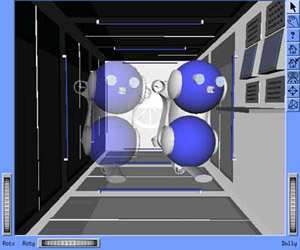
A new space robot system, the “Intra-Vehicular Free-Flyer System (IVFFS)” is proposed. The IVFFS has mobility similar to that of the PSA, and can also perform manipulation. This makes it capable of carrying out both contact and non-contact tasks. As the robot is teleoperated from the ground, it will be possible to perform space activities around the clock. Furthermore, we introduce an IVFFS concept robot named “Space Humming Bird” (SHB). SHB has a variably structured body to satisfy both safety and dexterity requirements. To perform prolonged contact-type manipulation, the robot is equipped with a locking device consisting of a suction disk attached to the tail. The suction device can attach to any flat surface. Several experiments involving a newly developed prototype model on a planar micro-gravity simulator are performed to confirm the feasibility of our concept. In the experiments, flying control and the proper procedure for wall-docking motion are introduced. Point-to-point motions, the wall-docking motion, a door-opening task and a detaching motion are performed.
VIDEO (double speed)(4MByte)in 2007
Fig. 1 Intra-Vehicular Free-Flyer
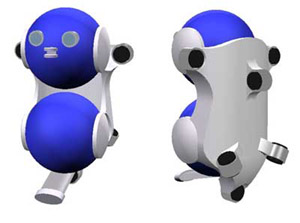
Fig. 2 Space Humming Bird

Fig. 3 Experimental Set-up
References