
Delta-Type Parallel Mechanism with Wire-Pulleys
It is well known that parallel mechanisms have several advantages, namely high power, rapidity and high stiffness. However, their workspace is limited due to interference of each chain. In our previous work, to expand the workspace of Delta mechanisms, ball bearings were employed instead of ball joints. Although this allowed a relatively wide workspace to be achieved, the clearance gap of the ball bearings introduced undesirable flexibility, while mechanical limitations persisted. To tackle these problems, a novel parallel mechanism with wire-pulleys is proposed. The basic structure of the new mechanism is the same as that of the conventional Delta mechanism, but wire-pulleys are employed instead of a parallel four-bar mechanism. The key feature of the wire-pulleys is its lack of mechanical limitations. A prototype has been designed and developed, which achieves a wider workspace and reduced backlash. In addition, the total parts quantity has declined by more than 25%.
Fig. 1 Delta-Type Parallel Mechanism with Wire-Pulleys
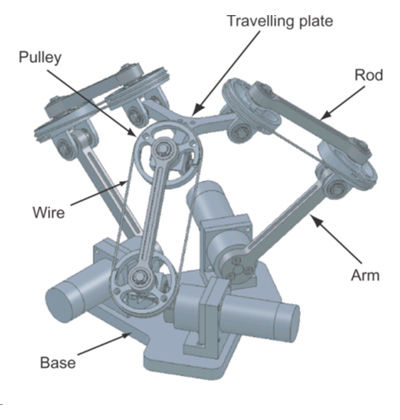
Fig. 2 Details of the mechanism
References